Новый инструмент позволяет любому человеку обучить робота - не требуется никаких навыков программирования
До сих пор для обучения роботов требовались специалисты, обладающие специальными навыками программирования. Недавно мы сообщали о учебном центре для человекоподобных роботов в Китае, где можно было взглянуть на роль тренера роботов. Однако теперь инженеры из Массачусетского технологического института разработали новый метод обучения роботов. Он позволяет пользователям обучать роботов тремя интуитивными способами. Особенность заключается в том, что обучение могут проводить не только программисты, но и любой человек.
Этот подход, названный 'Learning from Demonstration' (LfD), направлен на то, чтобы каждый мог обучить робота. В нем используется один инструмент, оснащенный датчиками, который делает обучение более простым и гибким. Основной принцип этого метода обучения так же стар, как и само человечество: Робот наблюдает за действием, выполняемым человеком, а затем должен выполнить его самостоятельно. Предыдущие методы LfD обычно относились к одной из трех категорий:
- Телеоперация: Робот управляется дистанционно (например, с помощью джойстика). Такой подход выгоден, например, при работе с токсичными веществами.
- Кинестетическое обучение: Пользователь физически перемещает руку робота, что может быть полезно, например, при регулировке положения тяжелых грузов.
- Естественное обучение: человек сам выполняет задание, а робот наблюдает и подражает ему. Это идеально подходит для тонких и точных маневров, таких как рисование логотипа.
Инновация: Универсальный демонстрационный интерфейс (VDI)
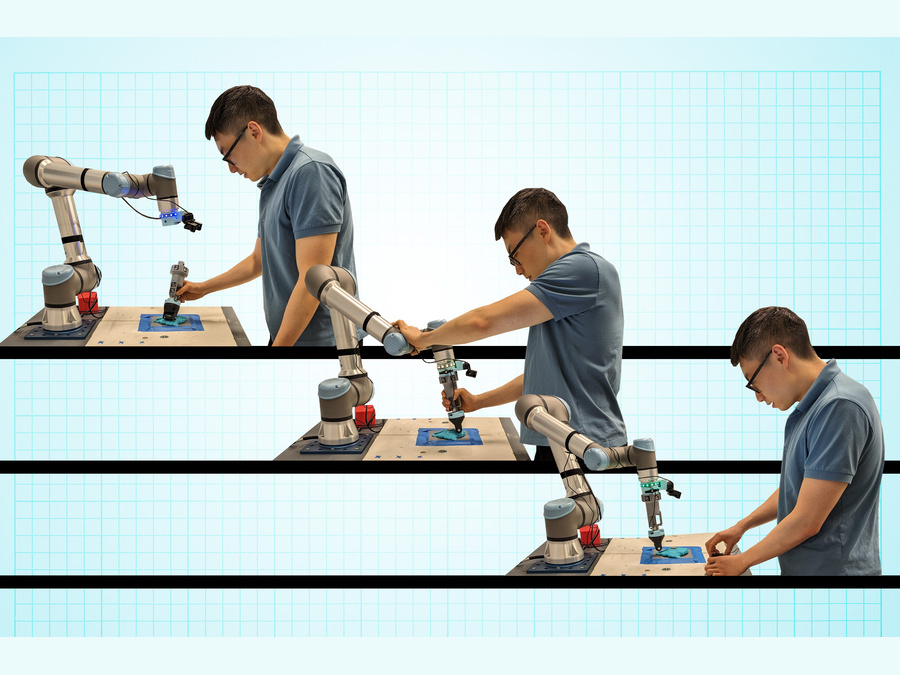
Команда Майка Хагеноу из Массачусетского технологического института под руководством профессора Джули Шах разработала инструмент "три в одном" под названием VDI. Он позволяет применять любой из описанных выше методов обучения и может расширить круг пользователей и "учителей", взаимодействующих с роботами. Это портативный элемент управления, оснащенный датчиками, который можно установить на обычные манипуляторы совместных роботов.
Это приспособление оснащено камерой, маркерами, отслеживающими положение, и датчиками силы для измерения давления. Новый инструмент был протестирован на добровольцах, выполнявших такие задания, как запрессовка (вдавливание колышков в отверстия) и формовка (придание формы тестообразной субстанции вокруг стержня). Исследователи обнаружили, что добровольцы, обладающие производственным опытом, в целом предпочитали естественный метод обучения.
Новый инструмент может быть использован для обучения промышленных роботов, таких как Walker S2. Видео с этим роботом недавно стало вирусным в социальных сетях, вызвав беспокойство. Но разработчики также видят большой потенциал для VDI в таких областях, как домашний уход и роботы в качестве помощников по хозяйству.
Хорошим примером бытового робота такого типа является 1X Neoкоторый уже доступен для предварительного заказа в США и должен быть поставлен в 2026 году. Майк Хагеноу (Mike Hagenow), постдокторант факультета аэронавтики и астронавтики Массачусетского технологического института, прокомментировал области применения этого метода обучения:
Мы пытаемся создать высокоинтеллектуальных и квалифицированных членов команды, которые смогут эффективно работать с людьми для выполнения сложной работы. Мы считаем, что гибкие демонстрационные инструменты могут помочь далеко не только на производстве, но и в других областях, где мы надеемся увидеть рост внедрения роботов, например, дома или в сфере ухода за больными".
Источник(и)